Ziel der Arbeit war, zu untersuchen, ob ein Multioutput-Regression-Modell (MOR) aus optischen Trackingdaten eines Braitenberg-Vehikels vom Typ 2 (BrV2) das Verhalten mit einem steuerbaren digitalen Zwilling (digitales Vehikel) in einem eingeschränkten Rahmen nachbilden kann. Dabei sollte geprüft werden, ob der digitale Zwilling ähnliche resiliente, systemunabhängige Eigenschaften aufweist und das verwendete ML-Modell das Verhalten auf neue Situationen generalisieren kann.
Zur Beantwortung der Forschungsfrage musste erstmal ein geeignetes ML-Modell gefunden und entwickelt werden. Dazu wurden verschiedene Modelle trainiert und getestet. Die Entwicklung umfasste die Fragen, welche Daten überhaupt vom Trackingsystem benötigt werden, dem Feature Engineering und der Feature Selection. Da die Modellentwicklung einen entscheidenden Einfluss auf die Erfolgschancen hat, nahm dieser Teil einen zentralen Anteil der Arbeit ein.
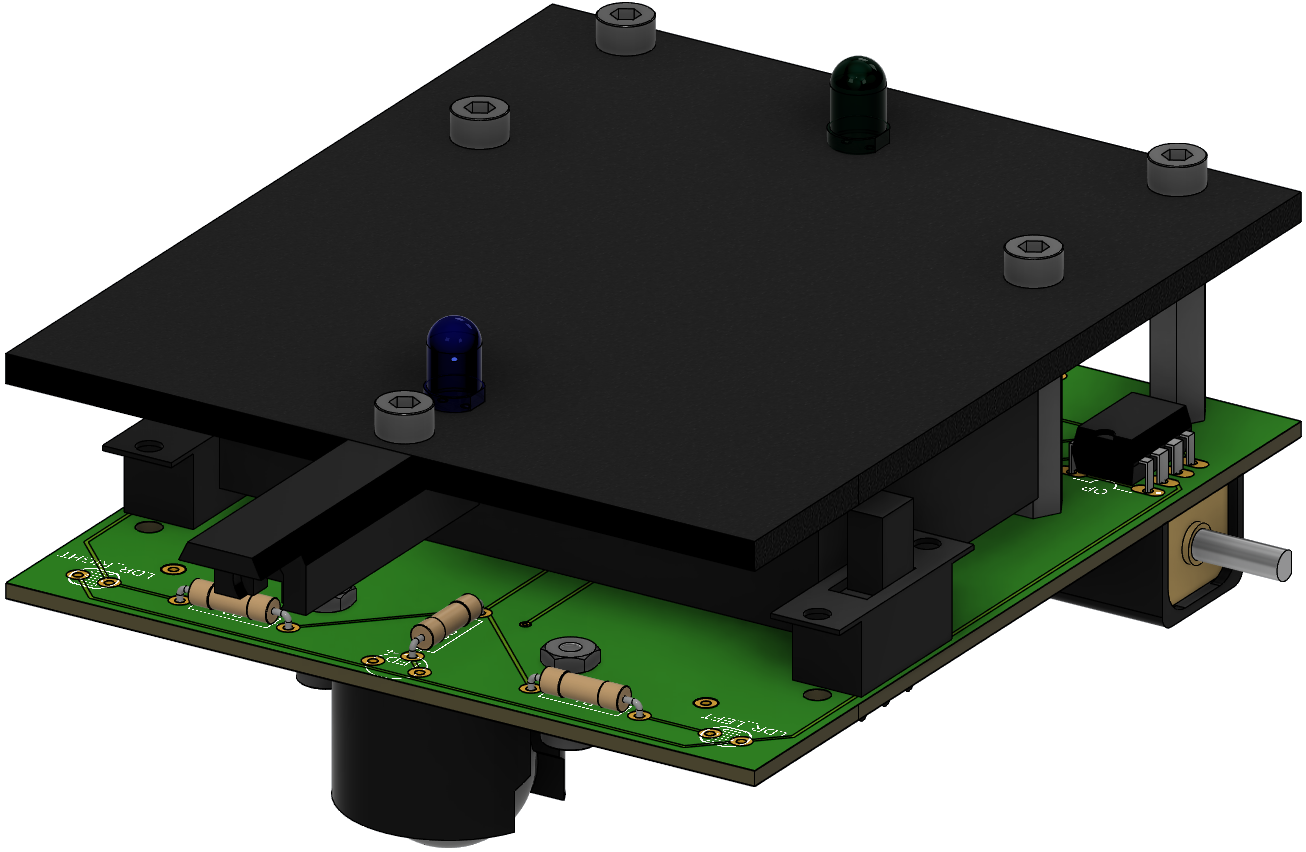
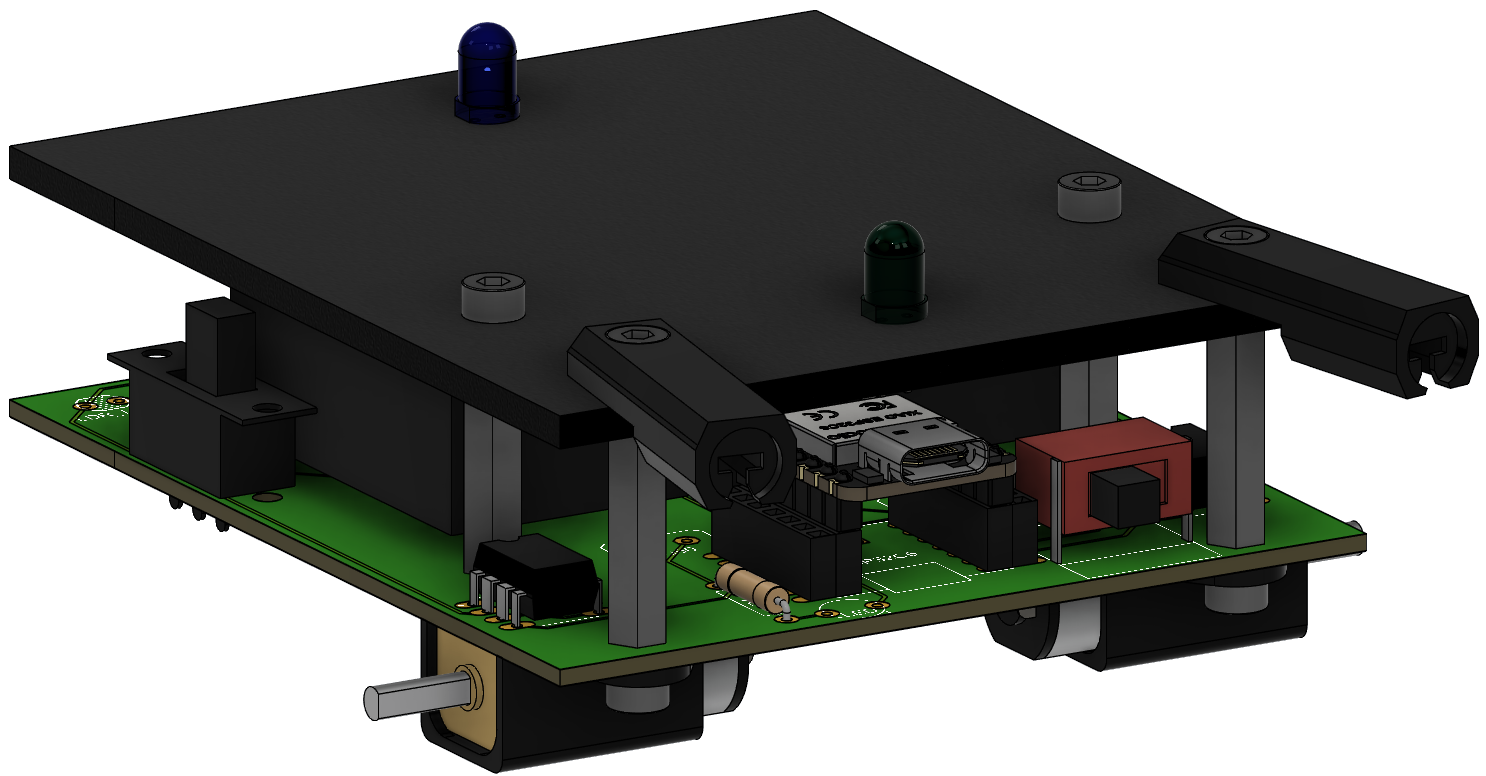
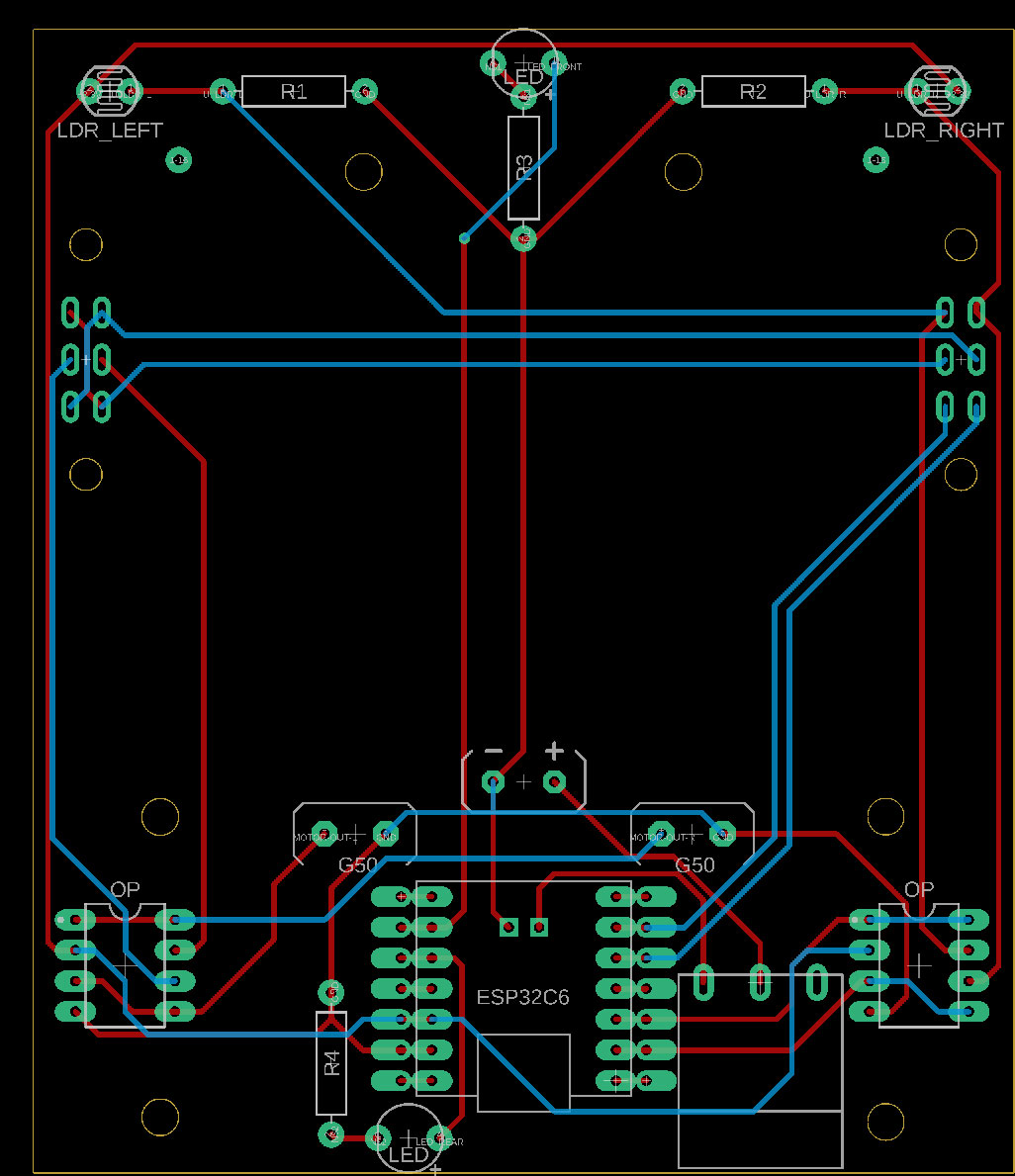
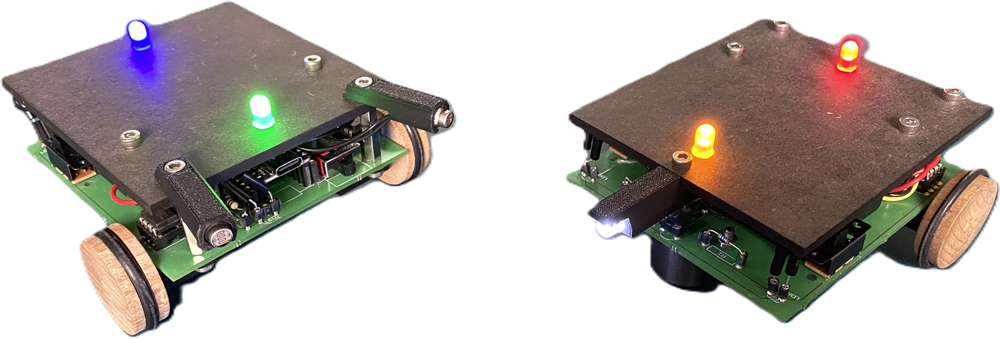
Bei den Trackingaufnahmen wurde ein analoges Vehikel mit zwei Lichtsensoren und Motoren, das einem BrV2 entsprach, über eine LED-Lichtquelle, die auf einem weiteren Vehikel montiert war, zu Fahrten angeregt. Dieses zweite Vehikel wurde manuell per Fernsteuerung gesteuert, wodurch unterschiedliche Lichtsituationen erzeugt werden konnten.
Das erfolgreichste Modell war das "Extra Trees Regressor" (ETR)-Modell. Es konnte das BrV2-Verhalten unter den eingeschränkten Rahmenbedingungen weitgehend nachbilden.
Tests mit unterschiedlich großen Rädern am vom ETR-Modell gesteuerten Vehikel zeigten, dass die resiliente Verhaltensweise in ähnlicher Form erhalten blieb. Allerdings musste das Modell aufgrund der verwendeten Features bei einer Veränderung der Vehikel-Komponenten nicht direkt für diese generalisieren können. Stattdessen war ein zeitliches Intervall, die Zeit, bis neue, vom ML-Modell vorhergesagte Motorwerte die Motoren erreichten, für die Resilienz von entscheidender Bedeutung. Dennoch wies das ETR-Modell eine gewisse Generalisierungsfähigkeit auf, da es im Einsatz auf neue Lichtsituationen traf und in der Regel das Verhaltensprinzip des BrV2 beibehielt.